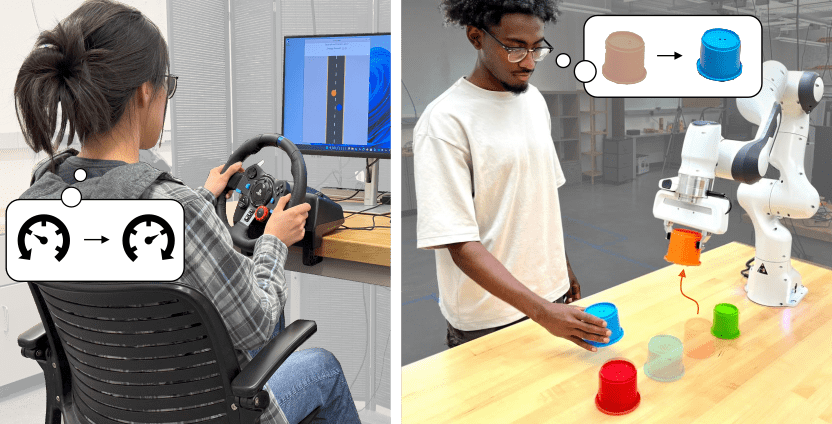
ELASTIC: Efficiently Learning to Adaptively Scale Test-Time Compute for Generative Control Policies
A. Li, G. Swamy, Y. Bisk, A. Bajcsy
arXiv, 2026
paper
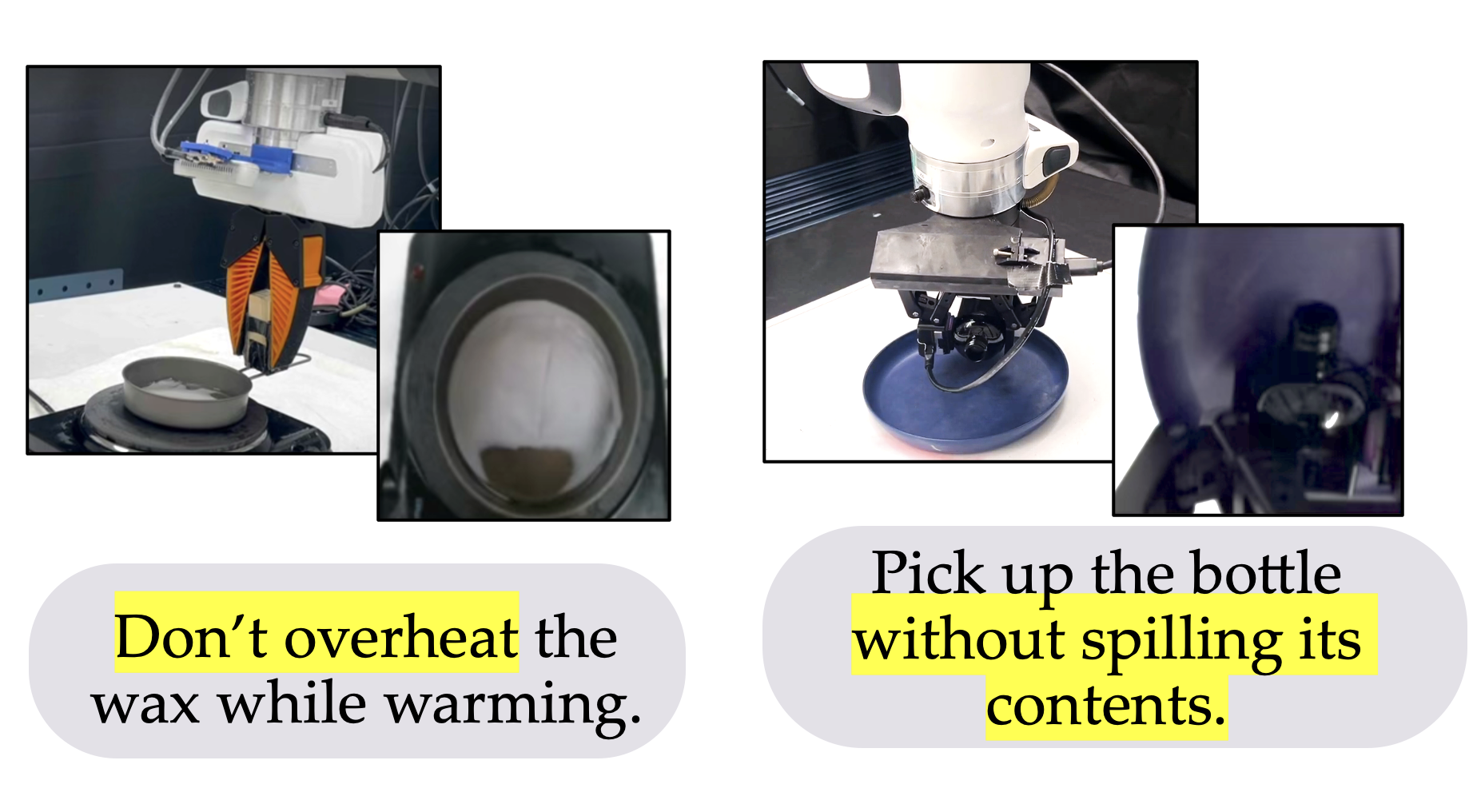
Inference-time Policy Steering via Vision and Touch
Y. Wu, Z. Si, Z Temel, O. Kroemer, A. Bajcsy
arXiv, 2026
paper website
WEAVER, Better, Faster, Longer: An Effective World Model for Robotic Manipulation
A. Jain*, Y. Wu*, J.Farebrother, G. Swamy, A. Bajcsy
arXiv, 2026
* equal contribution paper website code
Learning What to Say to Your VLA: Mostly Harmless Vision Language Action Model Steering
H.J. Jeong, G. Swamy, A. Bajcsy
arXiv, 2026
StressDream: Steering Video World Models for Robust Policy Evaluation and Improvement
J. Seo, S. Veer, R. Tian, W. Ding, A. Sharma, K. Leung, E. Schmerling, M. Pavone, A. Bajcsy
arXiv, 2026
Coordinated Diffusion: Generating Multi-Agent Behavior Without Multi-Agent Demonstrations
L. Peters, L. Ferranti†, J. Alonso-Mora†, A. Bajcsy† arXiv, 2026
† equal advising paper website
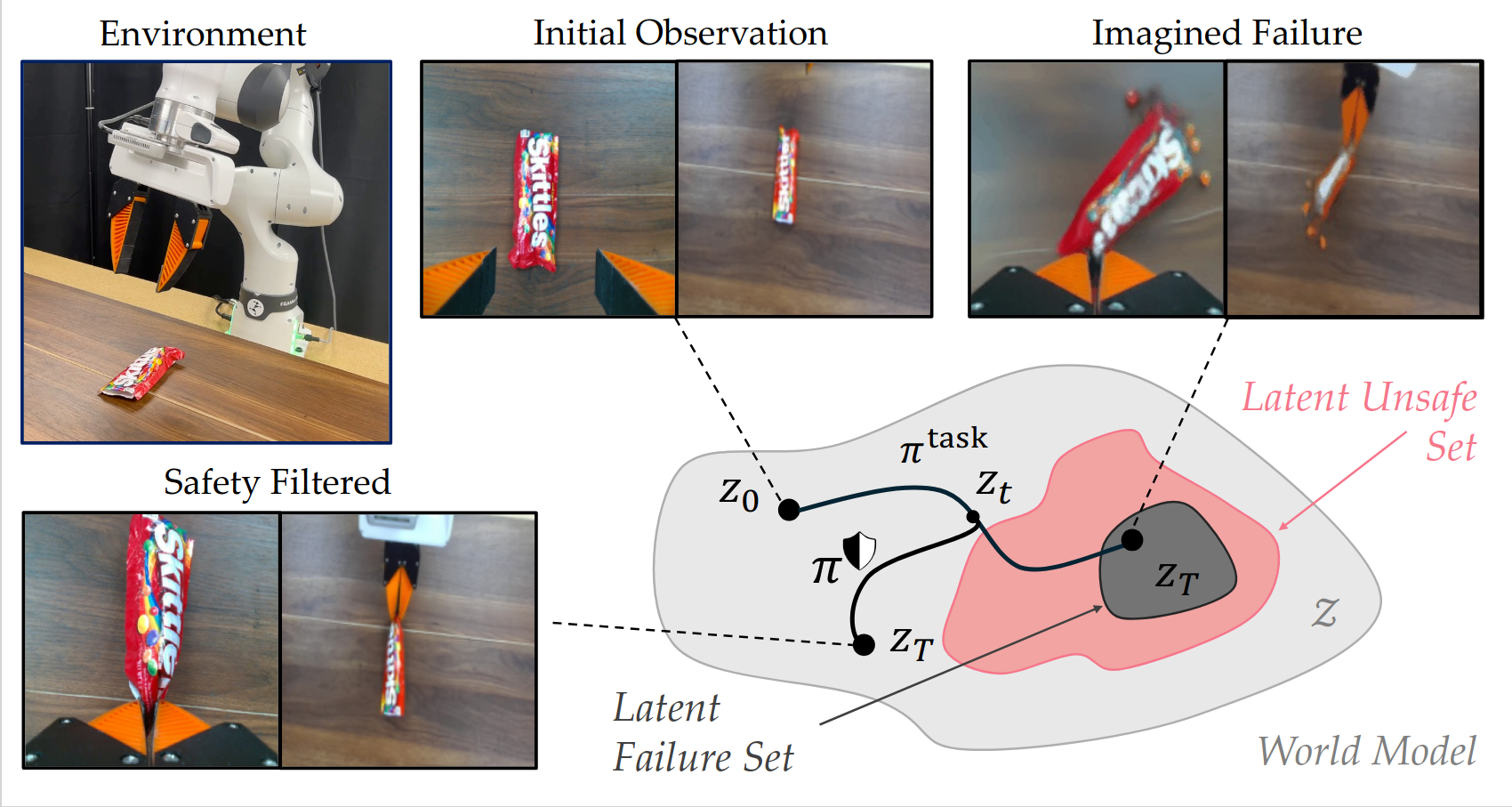
How Well Do Latent World Models Understand Partially Observable Safety Constraints?
M. Kim*, K. Nakamura*, A. Bajcsy
arXiv, 2026
* equal contribution paper website
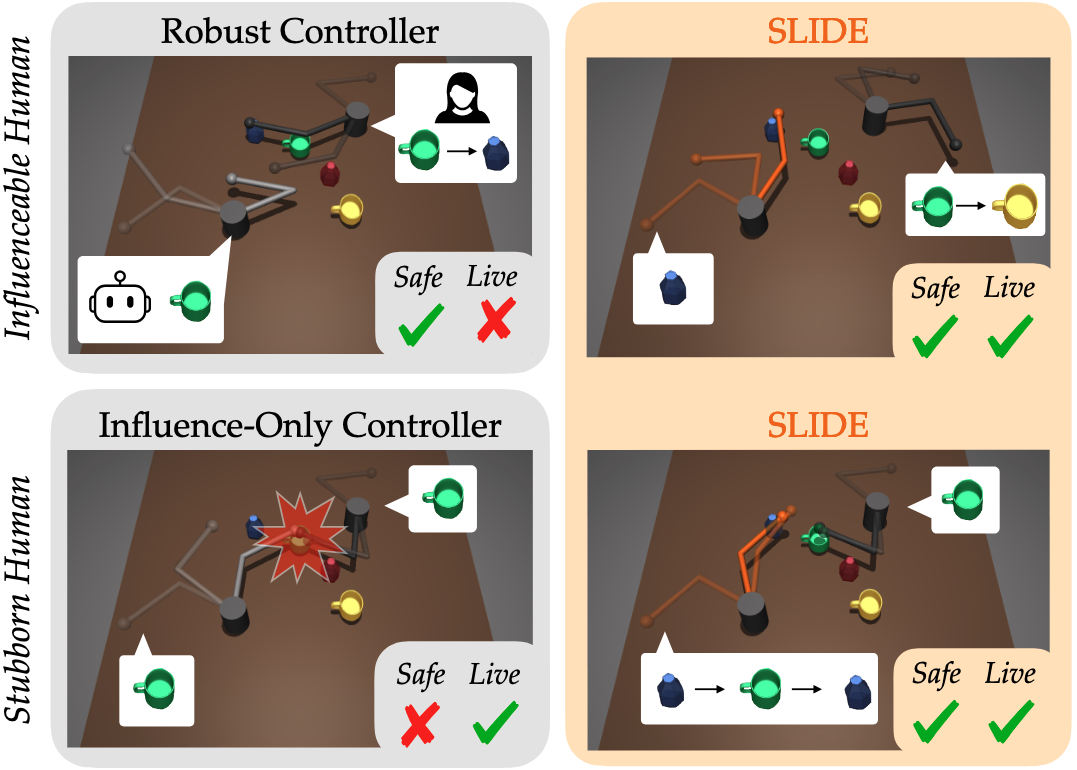
A Unified Framework for Robots that Influence Humans over Long-Term Interaction
S. Sagheb, S. Parekh, R. Pandya, Y. Mun, K. Driggs-Campbell, A. Bajcsy, D.P. Losey
arXiv, 2025
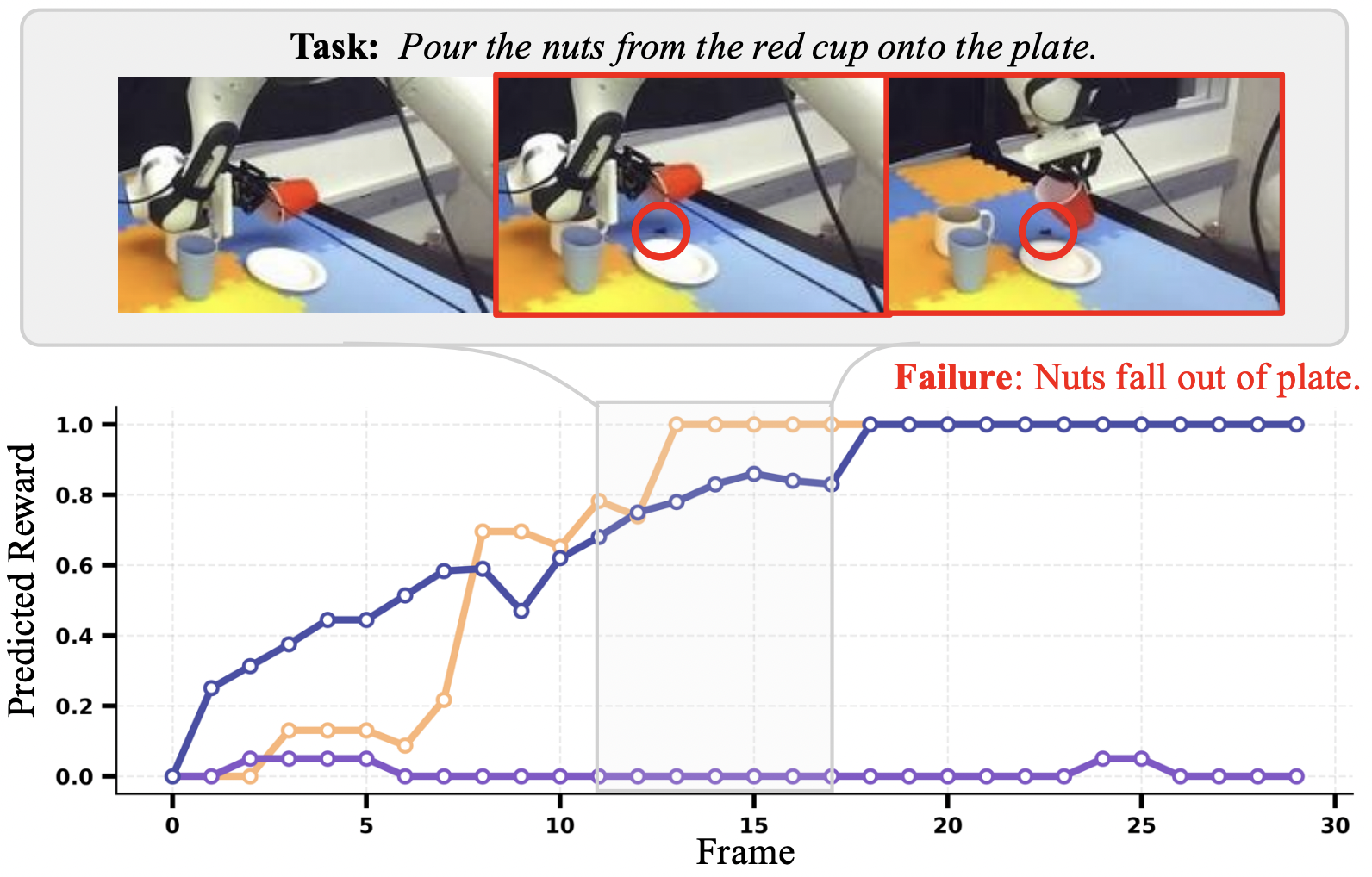
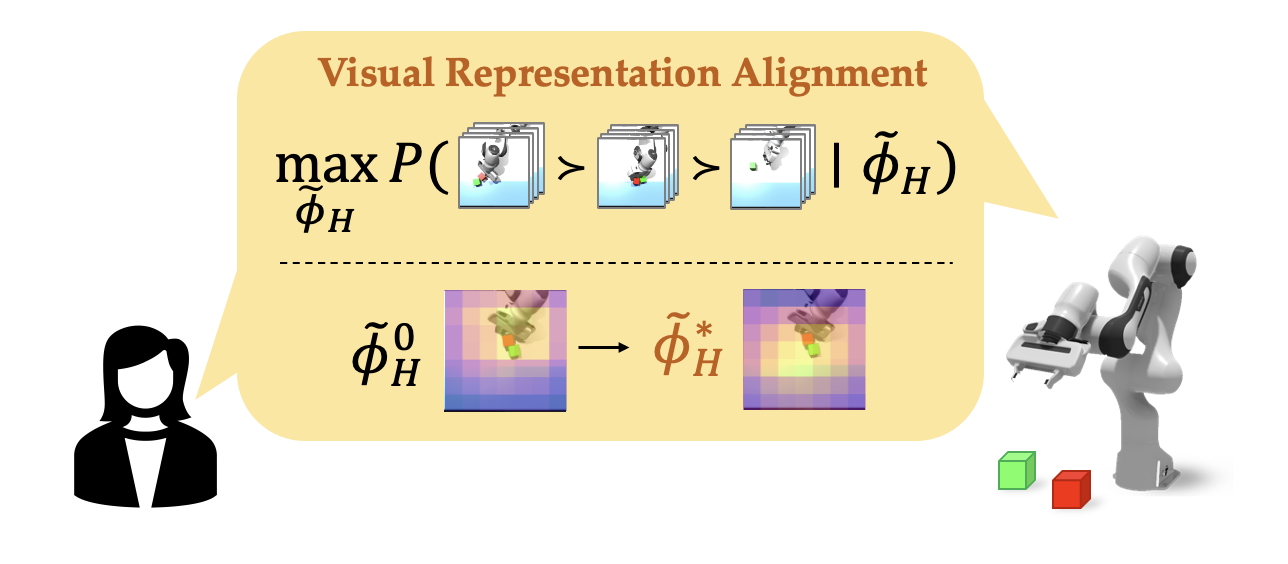
Maximizing Alignment with Minimal Feedback: Efficiently Learning Rewards for Visuomotor Robot Policy Alignment
R. Tian, Y. Wu, C. Xu, M. Tomizuka, J. Malik, A. Bajcsy
arXiv, 2024
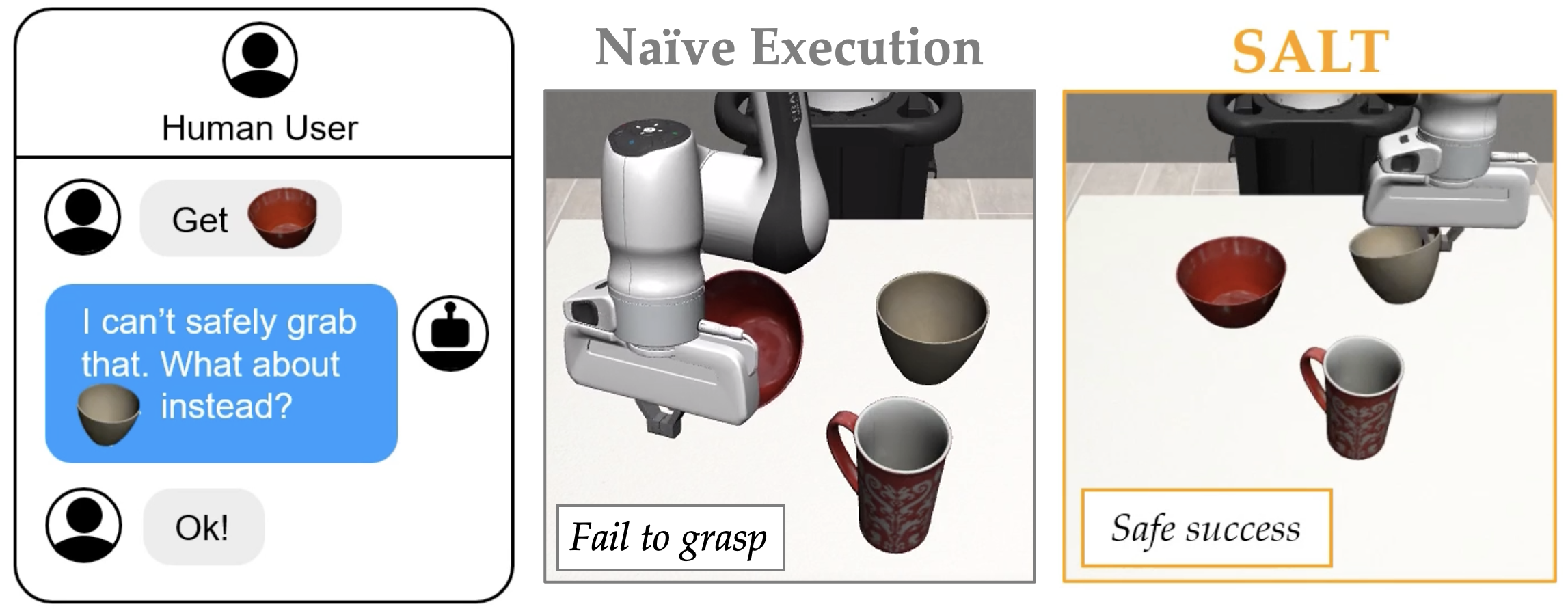
When to Act, Ask, or Learn: Uncertainty-Aware Policy Steering
J. Yuan*, Y. Wu*, A. Bajcsy
Robotics: Science and Systems (RSS), 2026
* equal contribution paper website
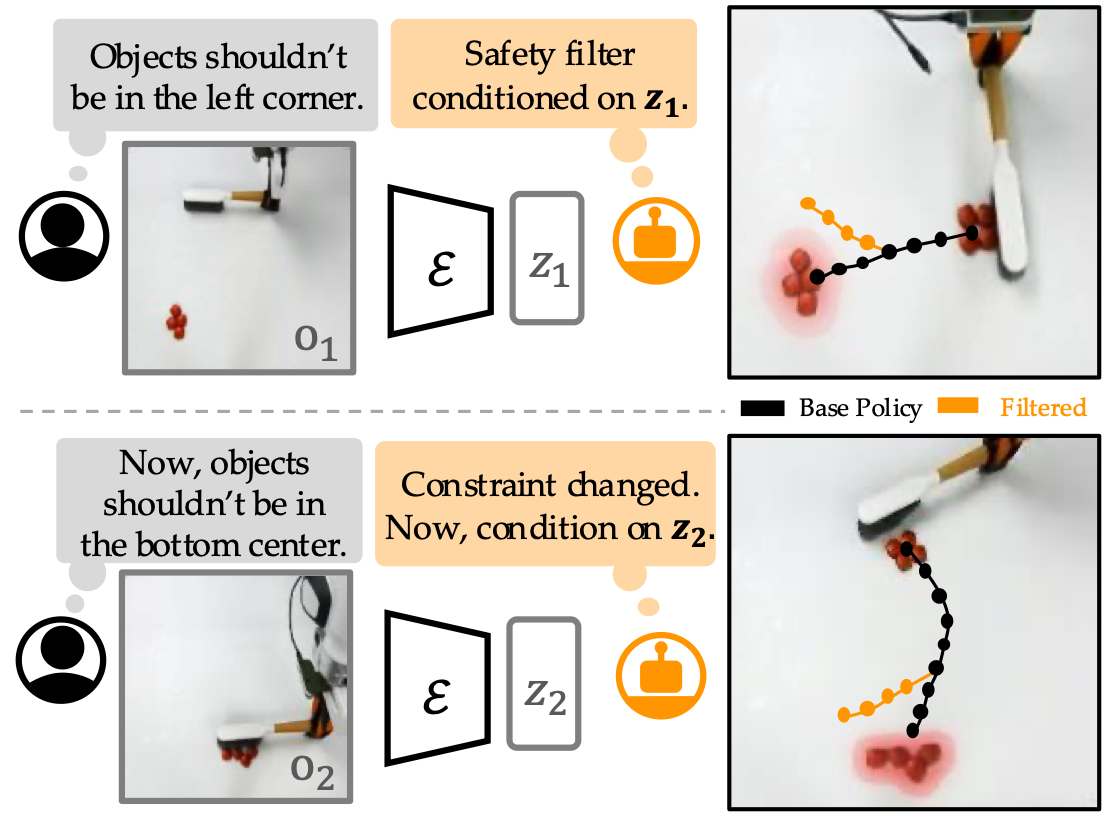
AnySafe: Adapting Latent Safety Filters at Runtime via Safety Constraint Parameterization in the Latent Space
S. Agrawal*, J. Seo*, K. Nakamura, R. Tian, A. Bajcsy
International Conference on Robotics and Automation (ICRA), 2026
* equal contribution paper website code
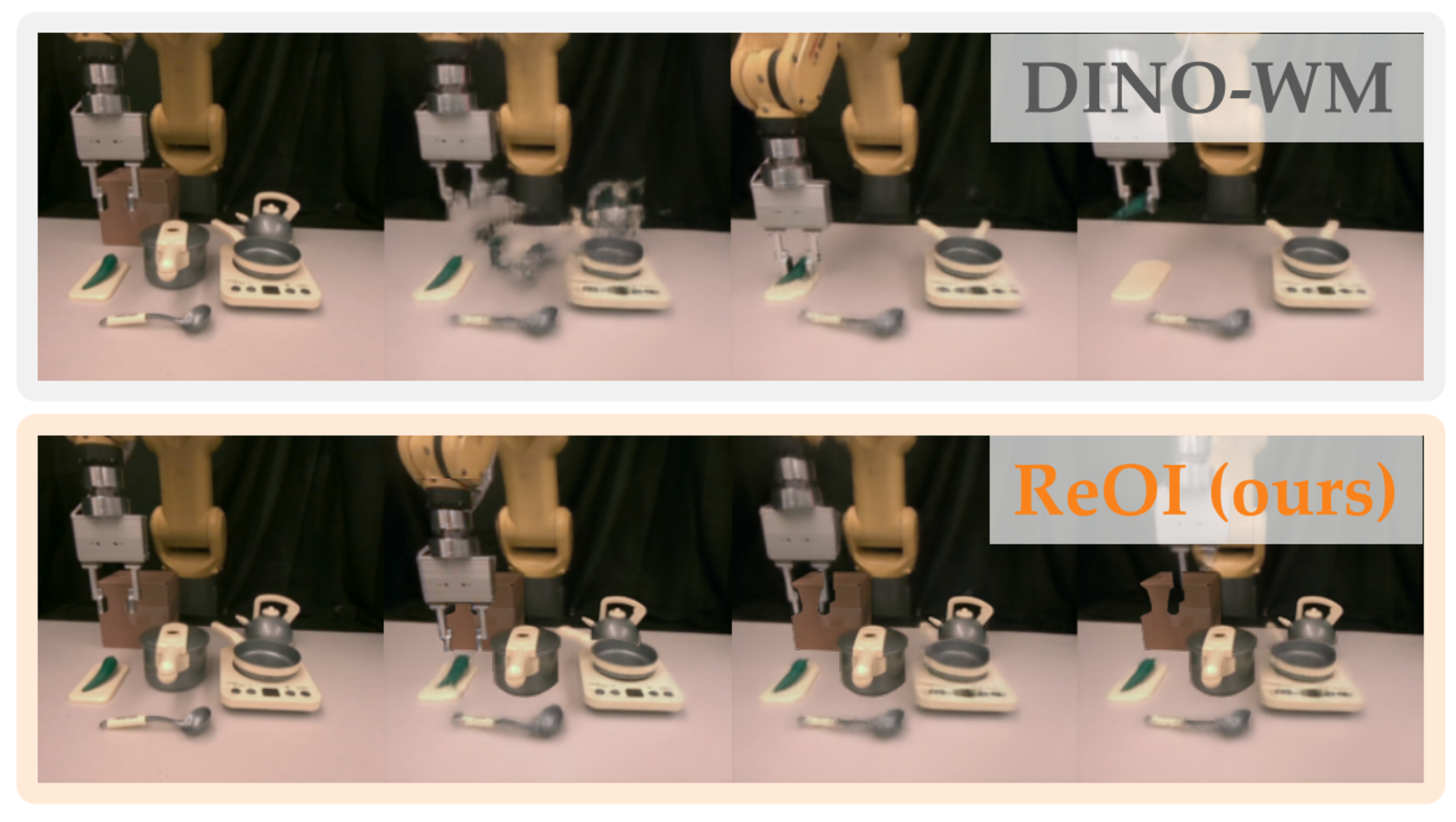
Reimagination with Test-time Observation Interventions: Distractor-Robust World Model Predictions for Visual Model Predictive Control
Y. Chen, J. Wei, C. Xu, B. Li, M. Tomizuka, A. Bajcsy, R. Tian
International Conference on Robotics and Automation (ICRA), 2026
(Best paper finalist at RSS workshop on OOD generalization)
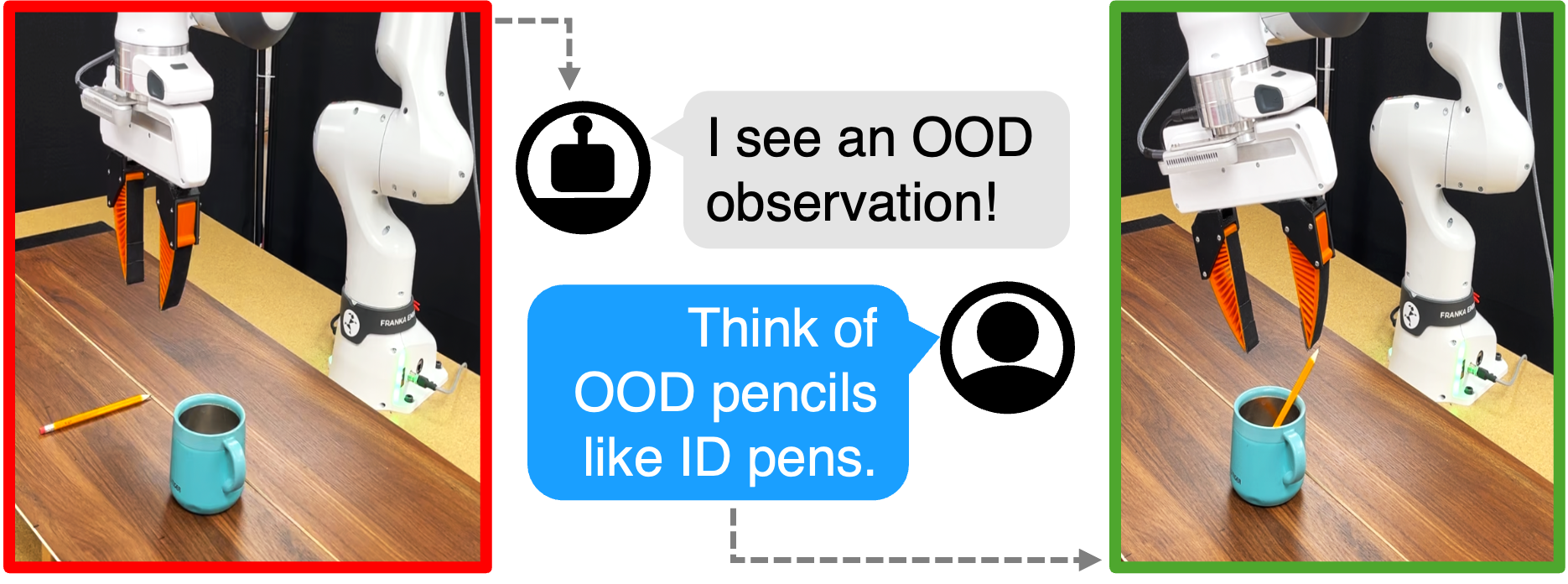
Do What You Say: Steering Vision-Language-Action Models via Runtime Reasoning-Action Alignment Verification
Y. Wu, A. Li, T. Hermans, F. Ramos, A. Bajcsy†, C. Pérez-D’Arpino† International Conference on Robotics and Automation (ICRA), 2026
(Best paper at CVPR workshop on Multi-modal Reasoning for Agentic Intelligence)
How to Train Your Latent Control Barrier Function: Smooth Safety Filtering Under Hard-to-Model Constraints
K. Nakamura, A.L. Bishop, S. Man, A.M. Johnson, Z. Machester, A. Bajcsy
Learning for Dynamics and Control Conference (L4DC), 2026
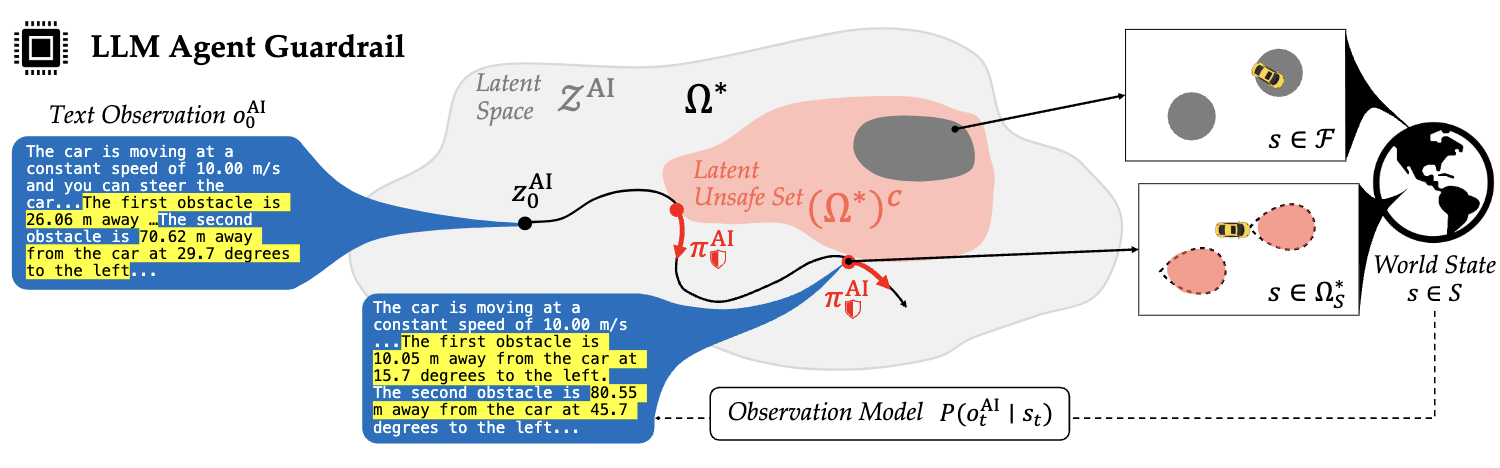
From Refusal to Recovery: A Control-Theoretic Approach to Generative AI Guardrails
R. Pandya, M. Bland, D.P. Nguyen, C. Liu, J.F. Fisac†, A. Bajcsy† International Association for Safe and Ethical AI (IASEAI), 2026
† equal advising paper
Adapting by Analogy: OOD Generalization of Visuomotor Policies via Functional Correspondence
P. Gupta, H. Admoni, A. Bajcsy
Conference on Robot Learning (CoRL), 2025
UNISafe: Uncertainty-aware Latent Safety Filters for Avoiding Out-of-Distribution Failures
J. Seo, K. Nakamura, A. Bajcsy
Conference on Robot Learning (CoRL), 2025
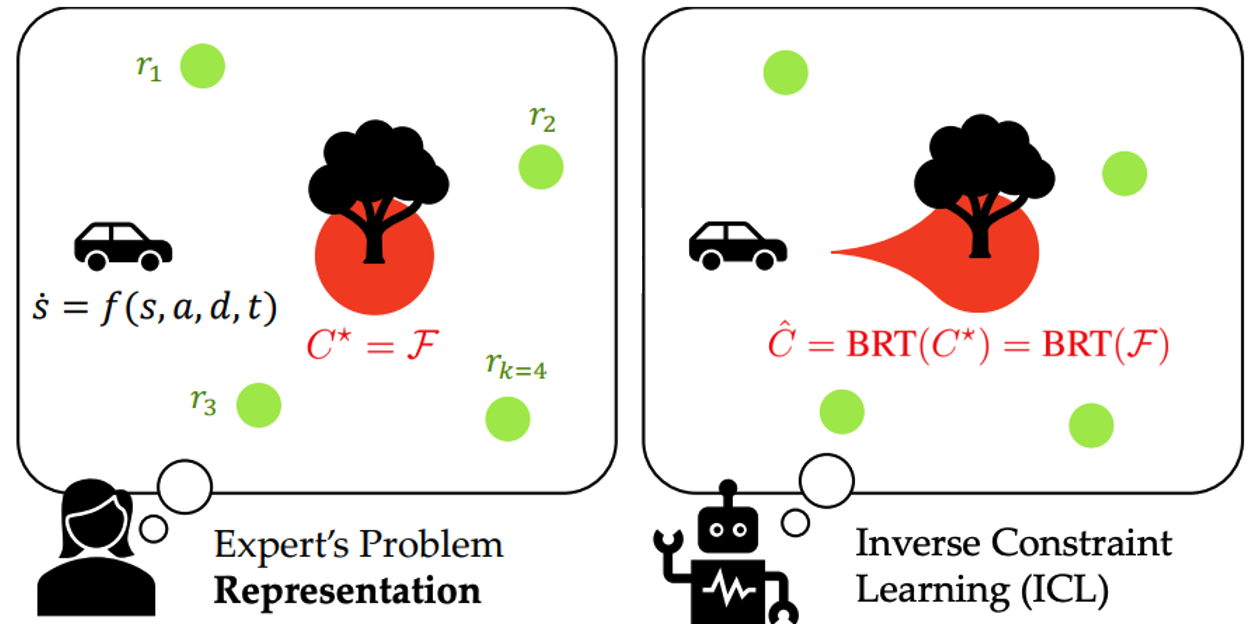
Your Learned Constraint is Secretly a Backward Reachable Tube
M. Qadri, G. Swamy, J. Francis, M. Kaess, A. Bajcsy
Reinforcement Learning Conference (RLC), 2025
Generalizing Safety Beyond Collision-Avoidance via Latent-Space Reachability Analysis
K. Nakamura, L. Peters, A. Bajcsy
Robotics: Science and Systems (RSS) , 2025
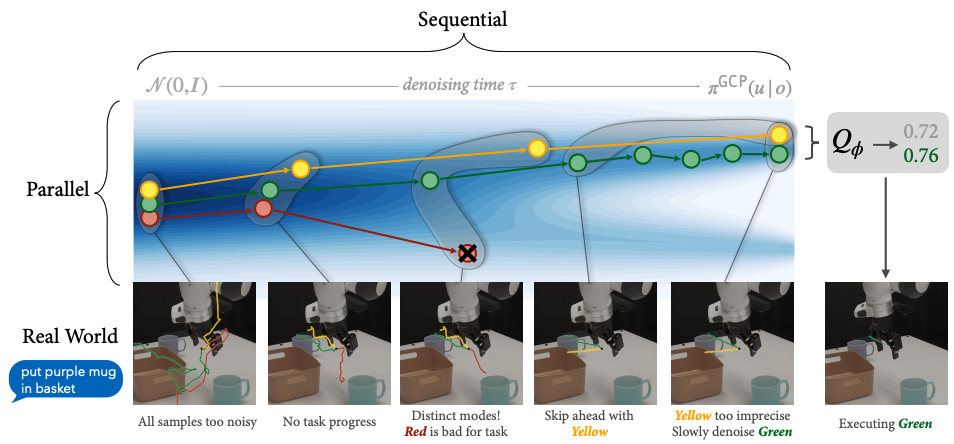
From Foresight to Forethought: VLM-In-the-Loop Policy Steering via Latent Alignment
Y. Wu, R. Tian, G. Swamy, A. Bajcsy
Robotics: Science and Systems (RSS) , 2025
(Best paper award at ICLR workshop on world models)
Intent Demonstration in General-Sum Dynamic Games via Iterative Linear-Quadratic Approximations
J. Li, A. Siththaranjan, S. Sojoudi, C. Tomlin, A. Bajcsy
IEEE Transactions on Control Systems Technology (TCST), 2024
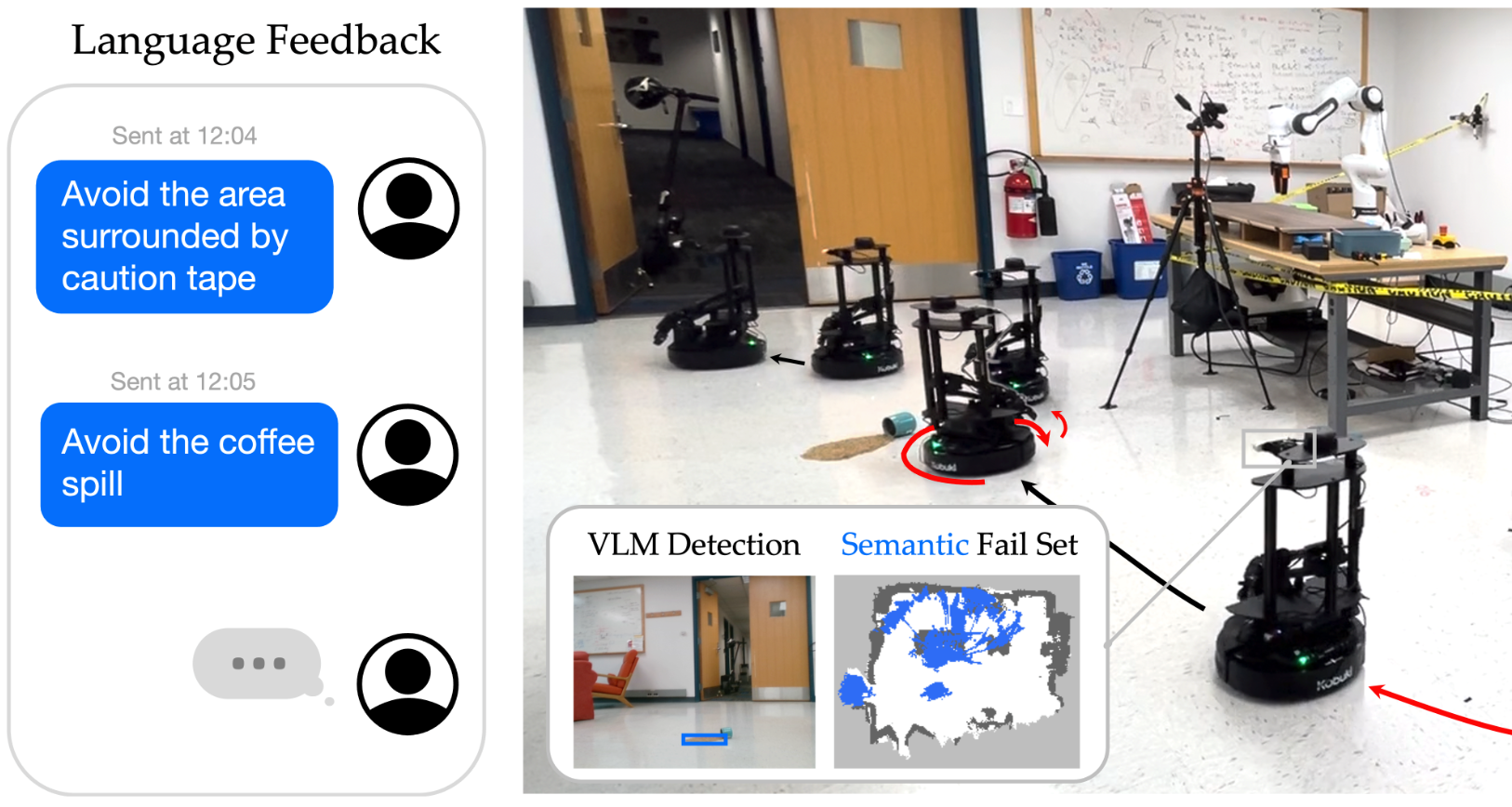
Updating Robot Safety Representations Online from Natural Language Feedback
L. Santos*, Z. Li*, L. Peters, S. Bansal†, A. Bajcsy† International Conference on Robotics and Automation (ICRA), 2025
* equal contribution, † equal advising paper website code
Robots that Learn to Safely Influence via Prediction-Informed Reach-Avoid Dynamic Games
R. Pandya, C. Liu, A. Bajcsy
International Conference on Robotics and Automation (ICRA), 2025
Conformalized Interactive Imitation Learning: Handling Expert Shift and Intermittent Feedback
M. Zhao, R.Simmons, H.Admoni, A. Ramdas†, A. Bajcsy† International Conference on Learning Representations (ICLR), 2025
Agent-to-Sim: Learning Interactive Behavior Models from Casual Longitudinal Videos
G. Yang, A. Bajcsy, S. Saito*, A. Kanazawa*
International Conference on Learning Representations (ICLR), 2025
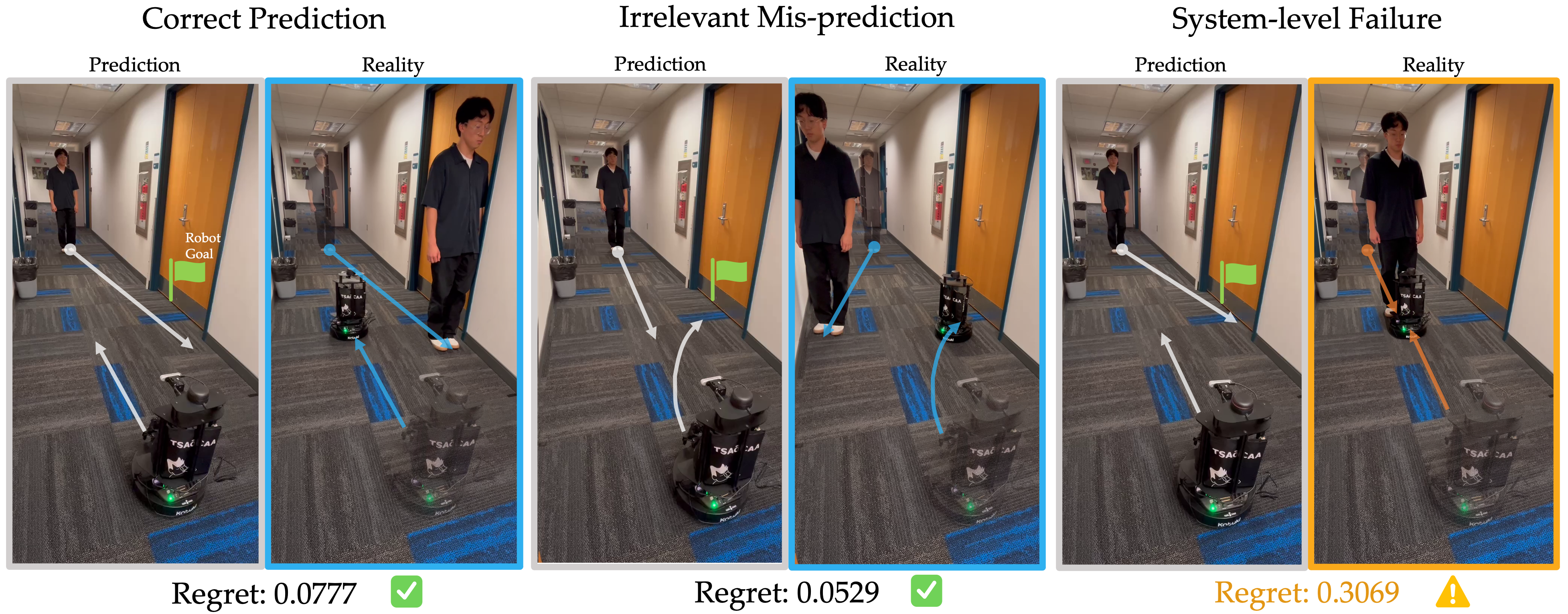
Not All Errors Are Made Equal: A Regret Metric for Detecting System-level Trajectory Prediction Failures
K. Nakamura, R. Tian, A. Bajcsy
Conference on Robot Learning (CoRL), 2024
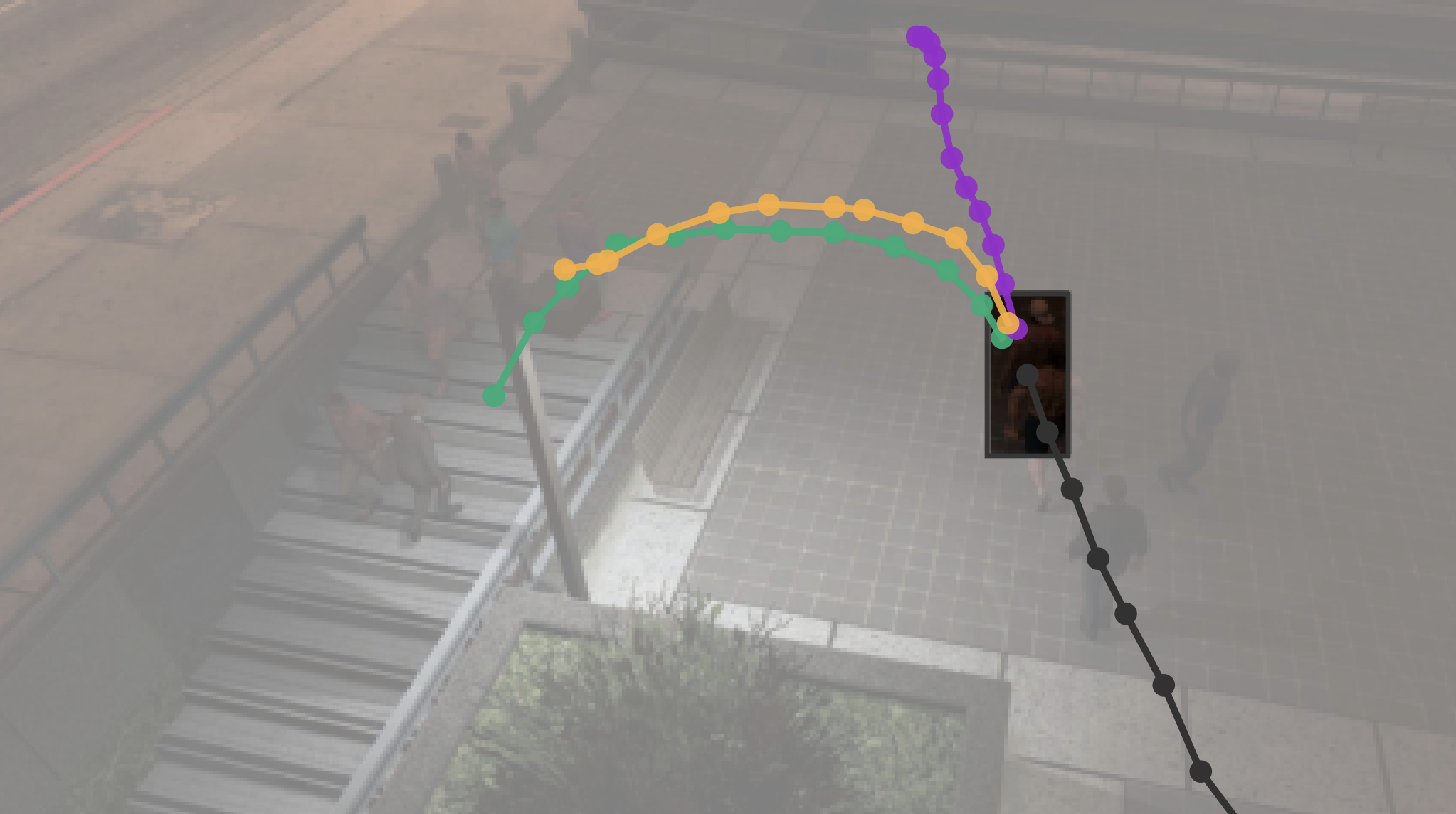
Adaptive Human Trajectory Prediction via Latent Corridors
N. Thakkar, K. Mangalam, A. Bajcsy, J. Malik
European Conference on Computer Vision (ECCV), 2024
Conformalized Teleoperation: Confidently Mapping Human Inputs to High-Dimensional Robot Actions
M. Zhao, R. Simmons, H. Admoni, A. Bajcsy
Robotics: Science and Systems (RSS), 2024
Conformal Decision Theory: Safe Autonomous Decisions without Distributions
J. Lekeufack*, A.N. Angelopoulos*, A. Bajcsy*, M.I. Jordan, J. Malik
International Conference on Robotics and Automation (ICRA), 2024
* denotes equal contribution paper website code
Learning Vision-Based Pursuit-Evasion Robot Policies
A. Bajcsy*, A. Loquercio*, A. Kumar, J. Malik
International Conference on Robotics and Automation (ICRA), 2024
* denotes equal contribution paper website code
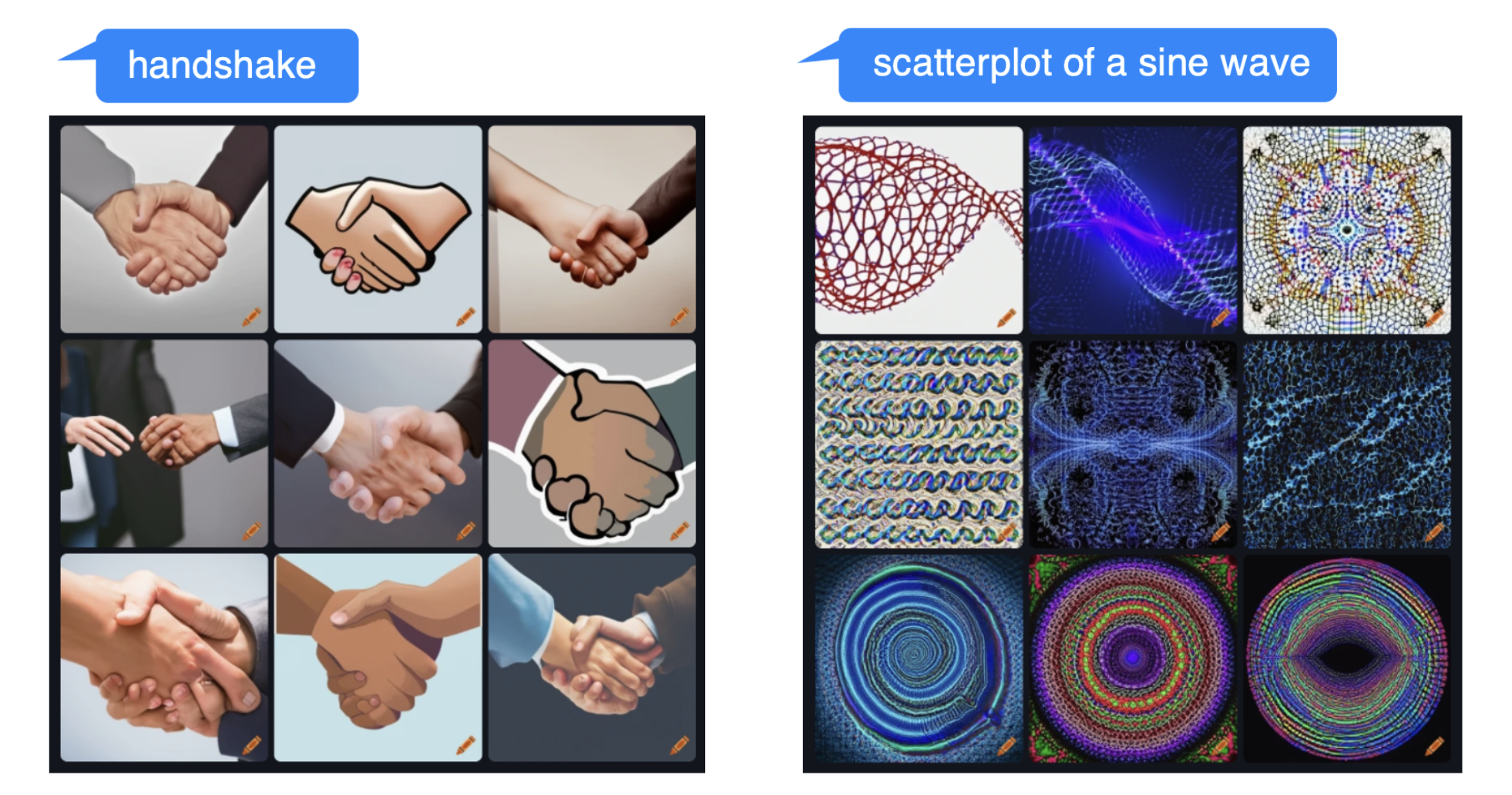
What Matters to You? Towards Visual Representation Alignment for Robot Learning
R. Tian, C. Xu, M. Tomizuka, J. Malik, A. Bajcsy
International Conference on Learning Representations (ICLR), 2024
Contingency Games for Multi-Agent Interaction
L. Peters, A. Bajcsy, C.Y Chiu, D. Fridovich-Keil, F. Laine, L. Ferranti, J. Alonso-Mora
Robotics and Automation Letters (RA-L), 2024
Deception Game: Closing the Safety-Learning Loop in Interactive Robot Autonomy
H. Hu*, Z. Zhang*, K. Nakamura, A. Bajcsy, J.F. Fisac
Conference on Robot Learning (CoRL), 2023
* denotes equal contribution paper website code
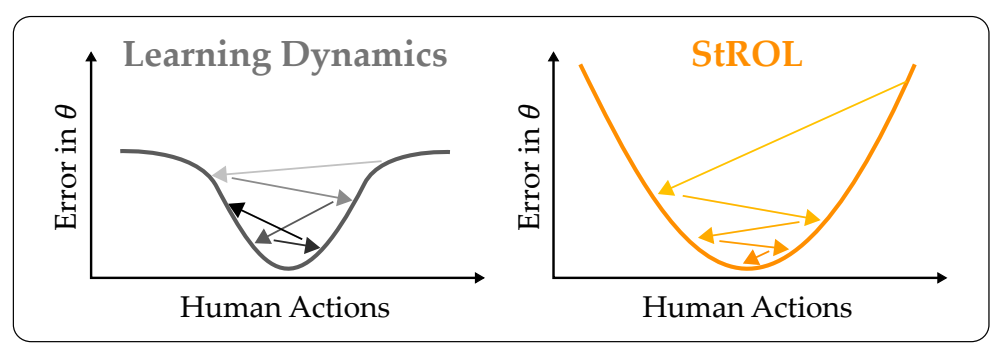
Towards Modeling and Influencing the Dynamics of Human Learning
R. Tian, M. Tomizuka, A. Dragan, A. Bajcsy
International Conference on Human-Robot Interaction (HRI), 2023
Towards Robots that Influence Humans over Long-Term Interaction
S. Sagheb, Y. Mun, N. Ahmadian, B.A. Christie, A. Bajcsy, K. Driggs-Campbell, D.P. Losey
International Conference on Robotics and Automation (ICRA), 2023
Towards the Unification and Data-Driven Synthesis of Autonomous Vehicle Safety Concepts
K. Leung*, A. Bajcsy*, E. Schmerling, M. Pavone
arXiv, 2022
* denotes equal contribution paper
Safety Assurances for Human-Robot Interaction via Confidence-aware Game-theoretic Human Models
R. Tian*, L. Sun*, A. Bajcsy*, M. Tomizuka, A.D. Dragan
International Conference on Robotics and Automation (ICRA), 2022
* denotes equal contribution paper code talk
Physical Interaction as Communication: Learning Robot Objectives Online from Human Corrections
D.P. Losey, A. Bajcsy, M.K. O'Malley, A.D. Dragan
International Journal of Robotics Research (IJRR), 2021
Analyzing Human Models that Adapt Online
A. Bajcsy, A. Siththaranjan, C.J. Tomlin, A.D. Dragan
International Conference on Robotics and Automation (ICRA), 2021
Efficient Dynamics Estimation with Adaptive Model Sets
E. Ratner, A. Bajcsy, C.J. Tomlin, A.D. Dragan
IEEE Robotics and Automation Letters (RA-L), 2021
A Robust Control Framework for Human Motion Prediction
A. Bajcsy, S. Bansal, E. Ratner, C.J. Tomlin, A.D. Dragan
IEEE Robotics and Automation Letters (RA-L), 2020
Quantifying Hypothesis Space Misspecification in Learning from Human-Robot Demonstrations and Physical Corrections
A. Bobu, A. Bajcsy, J.F. Fisac, S. Deglurkar, A.D. Dragan
IEEE Transactions on Robotics (T-RO), 2020
(Honorable Mention for the 2020 IEEE T-RO Best Paper Award)
A Hamilton-Jacobi Reachability-Based Framework for Predicting and Analyzing Human Motion for Safe Planning
S. Bansal*, A. Bajcsy*, E. Ratner*, A.D. Dragan, C.J. Tomlin
International Conference on Robotics and Automation (ICRA), 2020
* denotes equal contribution paper video
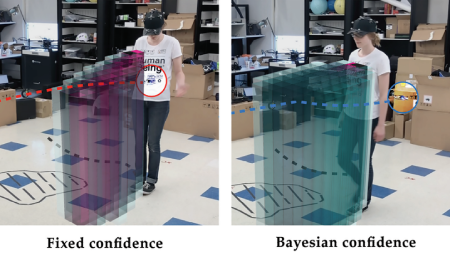
Confidence-aware motion prediction for real-time collision avoidance
D. Fridovich-Keil*, A. Bajcsy*, J.F. Fisac, S.L. Herbert, S. Wang, A.D. Dragan, C.J. Tomlin
International Journal of Robotics Research (IJRR), 2019
* denotes equal contribution paper code
An Efficient Reachability-Based Framework for Provably Safe Autonomous Navigation in Unknown Environments
A. Bajcsy*, S. Bansal*, E. Bronstein, V. Tolani, C.J. Tomlin
IEEE Conference on Decision and Control (CDC), 2019
* denotes equal contribution paper video website code
A Scalable Framework For Real-Time Multi-Robot, Multi-Human Collision Avoidance
A. Bajcsy*, S.L. Herbert*, D. Fridovich-Keil, J.F. Fisac, S. Deglurkar, A.D. Dragan, C.J. Tomlin
International Conference on Robotics and Automation (ICRA), 2019
* denotes equal contribution paper video code
Learning under Misspecified Objective Spaces
A. Bobu, A. Bajcsy, J.F. Fisac, A.D. Dragan
Conference on Robot Learning (CoRL), 2018
Probabilistically Safe Robot Planning with Confidence-Based Human Predictions
J.F. Fisac*, A. Bajcsy*, S.L. Herbert, D. Fridovich-Keil, S. Wang, C.J. Tomlin, A.D. Dragan
Robotics: Science and Systems (RSS), 2018
Learning from Physical Human Corrections, One Feature at a Time
A. Bajcsy, D.P. Losey, M.K. O'Malley, A.D. Dragan
International Conference on Human-Robot Interaction (HRI), 2018
Learning Robot Objectives from Physical Human Robot Interaction
A. Bajcsy*, D.P. Losey*, M.K. O'Malley, A.D. Dragan
Conference on Robot Learning (CoRL), 2017
A User-Centered Design and Analysis of an Electrostatic Haptic Touchscreen System for Students with Visual Impairments
A. Bateman, O. Zhao, A. Bajcsy, M. Jennings, B. Toth, A. Cohen, E. Horton, A. Khattar, R. Kuo, F. Lee, M.K. Lim, L. Migasiuk, R. Renganathan, A. Zhang, M.A. Oliveira
International Journal of Human-Computer Studies, 2017
A review of principles in design and usability testing of tactile technology for individuals with visual impairments
E.L. Horton, R. Renganathan, B.N. Toth, A.J. Cohen, A. Bajcsy, A. Bateman, M.C. Jennings, A. Khattar, R.S. Kuo, F.A. Lee, M.K. Lim, L.W, Migasiuk, A. Zhang, O.K. Zhao, M.A. Oliveira
Assistive Technology, 2016