Welcome to the Interactive and Trustworthy Robotics Lab! Our goal is to enable embodied AI agents to reliably interact with the open world.
This includes---but is not limited to---quantifying a robot's confidence (e.g., in a requested task or in their predictive models of the world), computing safe interaction policies (e.g., that prevent nuanced safety hazards like tearing, spilling, or breaking), and aligning AI models with hard-to-specify end-user values.
Towards this, our research develops theory and algorithms that draw upon optimal control and reinforcement learning, dynamic games, uncertainty quantification, and deep learning.
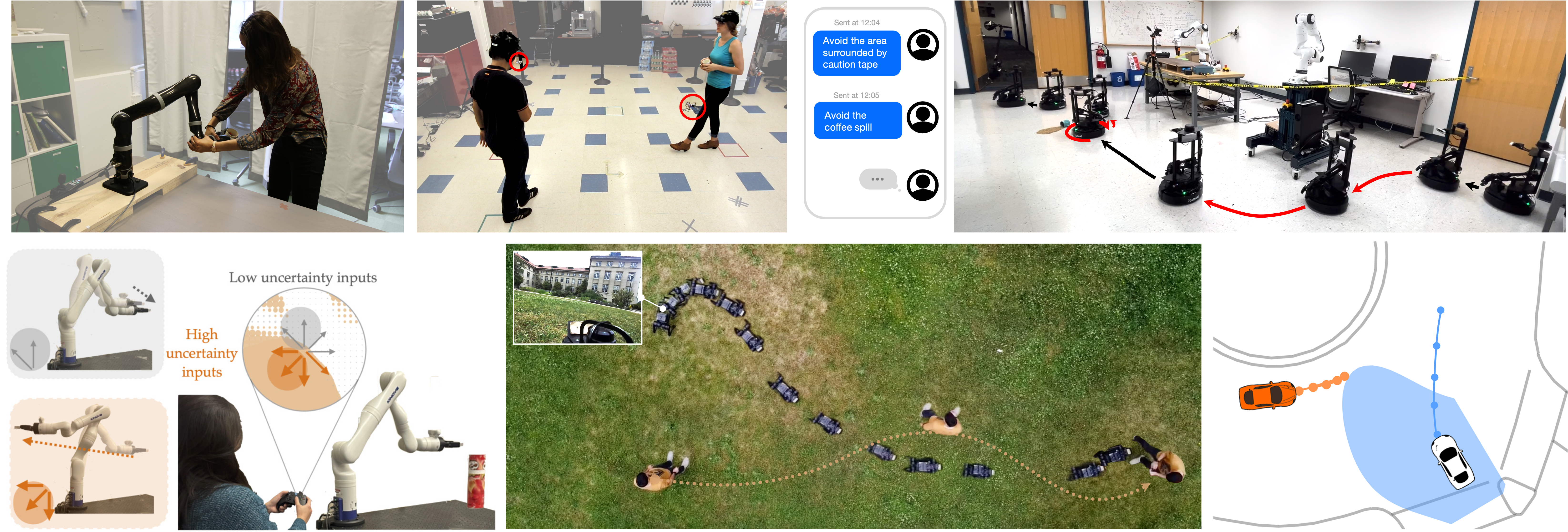
Our work is applied in a variety of domains, such as lightweight robotic arms, quadrotors, quadrupedal robots, and autonomous cars.
For a detailed research overview, please see our publications page.
Location: Tata Consultancy Services (TCS) Hall -- 453 (robotics lab), 454 (student office), 457 (conference room)
|